Cuando nos enfrentamos a problemas que hacen que nuestros algoritmos tarden horas en ejecutarse, la Programación Dinámica (PD) se presenta como un método eficaz de optimización.
Imagina un rompecabezas descompuesto en pequeñas piezas, cada una de las cuales se resuelve fácilmente, y cuyos resultados se combinan para formar la solución general. Así es como funciona la PD, transformando una complejidad exponencial en una polinómica.
Esta técnica no solo ahorra recursos computacionales, sino que cambia el enfoque mismo para resolver problemas algorítmicos, haciendo posible lo imposible.
En este artículo, analizaré a fondo qué es la programación dinámica, sus métodos clave y cómo aplicarla en escenarios reales con ejemplos de código en Java.

¿Qué es la programación dinámica? (Una analogía práctica)
La programación dinámica es una técnica de optimización que resuelve problemas complejos dividiéndolos en subproblemas más pequeños y superpuestos. La clave es que cada subproblema se resuelve una sola vez y su resultado se almacena, evitando recalcularlo y mejorando drásticamente la eficiencia del algoritmo.
Para entender el concepto sin dolor, me gusta usar esta analogía: la preparación de una lasaña.
Para obtener el plato final, se deben completar varios pasos: preparar la salsa, cocinar la carne, rallar el queso y luego ensamblar todo en capas. Si cada vez que la receta requiere salsa, tuvieras que prepararla desde cero, el proceso consumiría una cantidad de tiempo considerable. En su lugar, es más eficiente preparar la salsa una sola vez y reutilizarla en cada capa.
La programación dinámica opera bajo un principio similar: descompone un problema principal en subproblemas. Cada subproblema se resuelve una única vez, su resultado se almacena (o “memoriza”), y luego se reutiliza tantas veces como sea necesario.
Los principios fundamentales del método
A diferencia de los algoritmos “voraces” (greedy), la PD encuentra soluciones óptimas almacenando los resultados de los subproblemas ya resueltos. El método se basa en dos principios fundamentales:
- El principio de optimalidad de Bellman: Establece que una solución óptima a un problema se puede construir a partir de las soluciones óptimas de sus subproblemas. En otras palabras, si hemos encontrado una ruta óptima hacia un estado particular, la parte de esa ruta hasta cualquier estado intermedio también debe ser óptima. Su creador fue el matemático Richard Bellman.
- Subproblemas superpuestos: Significa que los mismos problemas pequeños surgen repetidamente al resolver el problema original. En lugar de recalcularlos, yo almaceno los resultados en una tabla o caché.
Esto nos permite evitar la explosión combinatoria que a menudo ocurre con un enfoque recursivo ingenuo.
Comparativa: PD vs. Otros Algoritmos
| Característica | Programación dinámica | Algoritmos “voraces” | Búsqueda exhaustiva (Brute-force) |
|---|---|---|---|
| Complejidad temporal | Generalmente O(n^2) o O(n^3) | A menudo O(n \log n) o O(n) | Exponencial O(2^n) o superior |
| Complejidad espacial | O(n) o O(n^2) | Generalmente O(1) o O(n) | Depende de la implementación |
| Garantía de optimalidad | Sí, siempre | No siempre | Sí, siempre |
| Aplicabilidad | Problemas con subestructura óptima | Problemas con “elección voraz” | Cualquier tipo de problema |
Un ejemplo clásico donde la programación dinámica demuestra su eficacia es el cálculo de los números de Fibonacci” La fórmula recursiva F(n) = F(n-1) + F(n-2) conduce a un número exponencial de cálculos, como demuestra esta clase de introducción a los algoritmos del MIT, mientras que el enfoque dinámico reduce la complejidad a lineal.
Tipos de Programación Dinámica: Memoización vs. Tabulación

Existen dos tipos de programación dinámica principales: la memoización (enfoque Top-Down), que resuelve el problema de forma recursiva y guarda los resultados, y la tabulación (enfoque Bottom-Up), que lo resuelve de forma iterativa construyendo una tabla de soluciones desde los casos más simples. Yo utilizo uno u otro dependiendo de las restricciones de memoria y la naturaleza del problema.
1. Recursión con Memoización (Top-Down)
Este enfoque comienza con el problema original y lo descompone en subproblemas. Los resultados de los subproblemas ya resueltos se guardan en una estructura de datos (generalmente una tabla hash) para evitar cálculos repetidos. Para entender mejor el concepto, puedes usar herramientas que permiten visualizar la recursión.
- Ventaja: Es especialmente conveniente cuando no es necesario resolver todos los subproblemas.
- Lógica: Antes de calcular un subproblema, se verifica si ya existe un valor almacenado. Si es así, se utiliza dicho valor.
Ejemplo en Java (Fibonacci con Memoización):
// Puedes consultar la documentación oficial de HashMap para más detalles
// https://docs.oracle.com/en/java/javase/17/docs/api/java.base/java/util/HashMap.html
Map<Integer, Long> memo = new HashMap<>();
public long fibonacci(int n) {
// Casos base
if (n <= 1) return n;
// Verificamos si ya hemos resuelto este subproblema
if (memo.containsKey(n)) return memo.get(n);
// Calculamos y guardamos el resultado
long result = fibonacci(n - 1) + fibonacci(n - 2);
memo.put(n, result);
return result;
}2. Enfoque Tabular (Bottom-Up)
Comienza resolviendo los subproblemas más pequeños y construye gradualmente la solución para problemas más grandes. Los resultados se almacenan en una tabla (generalmente un array o una matriz).
- Ventaja: Suele ser más eficiente en términos de memoria y evita la sobrecarga de las llamadas recursivas (Stack Overflow), un problema común en la recursividad.
Ejemplo en Java (Fibonacci con Tabulación):
public long fibonacci(int n) {
// Manejamos los casos base
if (n <= 1) return n;
// Inicializamos la tabla
long[] table = new long[n + 1];
table[0] = 0;
table[1] = 1;
// Llenamos la tabla de forma iterativa
for (int i = 2; i <= n; i++) {
table[i] = table[i - 1] + table[i - 2];
}
return table[n];
}La elección depende del problema. La memoización es más fácil de implementar si la solución recursiva es obvia, pero la tabulación permite optimizaciones espaciales, como reducir la memoria a O(1) si solo necesitamos los últimos estados.
Cómo Resolver Problemas con Programación Dinámica en 5 Pasos
La resolución de un problema mediante programación dinámica se puede sistematizar en cinco pasos claros. Este enfoque me ayuda a estructurar el pensamiento y a desarrollar soluciones eficientes.
- Definir la estructura de una solución óptima: Verifica si el problema tiene una subestructura óptima. Esto significa que la solución óptima de un problema mayor contiene las soluciones óptimas de sus subproblemas.
- Formular una definición recursiva: Formula una relación de recurrencia que vincule la solución del problema original con las de los subproblemas.
- Calcular de abajo hacia arriba (bottom-up): Implementa un algoritmo que calcule los valores óptimos comenzando por los más pequeños. Esto evita cálculos repetidos.
- Reconstruir la solución óptima: A menudo no basta con el valor numérico (ej: “valor máximo 50”), sino que necesitamos saber qué ítems componen ese valor. Esto se logra mediante un recorrido inverso desde el estado final.
- Analizar y optimizar: Analiza la complejidad temporal y espacial. A menudo, es posible optimizar el espacio utilizando solo los últimos valores calculados.
Ejemplo de los pasos aplicados a la Subsecuencia Común Más Larga (LCS):
// Paso 1: Estructura de la solución óptima
// LCS(X[1..m], Y[1..n]) depende de LCS(X[1..m-1], Y[1..n]), LCS(X[1..m], Y[1..n-1]) y LCS(X[1..m-1], Y[1..n-1])
// Paso 2: Definición recursiva
// Si X[m] = Y[n], entonces LCS(X[1..m], Y[1..n]) = 1 + LCS(X[1..m-1], Y[1..n-1])
// De lo contrario, LCS(X[1..m], Y[1..n]) = max(LCS(X[1..m-1], Y[1..n]), LCS(X[1..m], Y[1..n-1]))
// Paso 3: Cálculo de abajo hacia arriba
int lcs(String X, String Y) {
int m = X.length(), n = Y.length();
int[][] dp = new int[m+1][n+1];
for (int i = 0; i <= m; i++) {
for (int j = 0; j <= n; j++) {
if (i == 0 || j == 0)
dp[i][j] = 0;
else if (X.charAt(i-1) == Y.charAt(j-1))
dp[i][j] = dp[i-1][j-1] + 1;
else
dp[i][j] = Math.max(dp[i-1][j], dp[i][j-1]);
}
}
return dp[m][n];
}
// Paso 4: Reconstrucción de la solución
// Mediante un recorrido inverso desde dp[m][n] hasta dp[0][0]
// Paso 5: Análisis
// Complejidad temporal: O(m*n)
// Complejidad espacial: O(m*n), se puede optimizar a O(min(m,n))Algoritmos de Programación Dinámica: Problemas Clásicos
Comprender estos problemas clásicos es vital. Muchos de los desafíos “nuevos” que me encuentro en el mundo real son, en el fondo, variaciones de estos patrones. Dominarlos te da una intuición increíble para saber cuándo y cómo aplicar la programación dinámica.
Aquí te desgloso los más importantes:
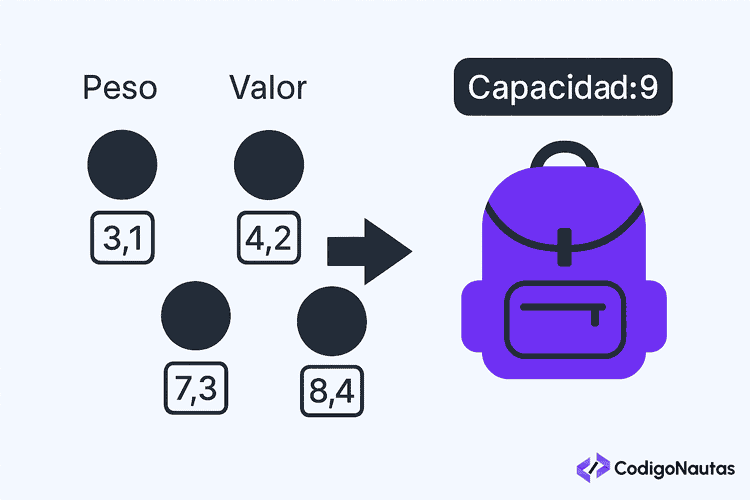
1. Problema de la Mochila (Knapsack Problem)
- Problema: Tienes un conjunto de ítems, cada uno con un peso y un valor. Debes decidir qué ítems meter en una mochila con capacidad limitada para maximizar el valor total.
- Subestructura Óptima: El valor máximo que puedes obtener con
iítems y una capacidadwdepende del valor máximo que podías obtener coni-1ítems. - Relación de Recurrencia:
DP[i][w] = max(DP[i-1][w], DP[i-1][w-peso[i]] + valor[i])2. Subsecuencia Común Más Larga (LCS)
- Problema: Dadas dos secuencias (por ejemplo, dos strings), encontrar la subsecuencia más larga que sea común a ambas.
- Subestructura Óptima: La LCS de dos cadenas
XeYse basa en la solución de la LCS para prefijos más cortos deXeY. - Relación de Recurrencia:
if (X[i] == Y[j])
LCS[i][j] = 1 + LCS[i-1][j-1]
else
LCS[i][j] = max(LCS[i-1][j], LCS[i][j-1])3. Distancia de Edición (Edit Distance)
- Problema: Calcular el número mínimo de operaciones (inserción, eliminación o sustitución) necesarias para convertir una cadena de texto en otra.
- Subestructura Óptima: La distancia entre dos cadenas
XeYse calcula a partir de la distancia entre prefijos más cortos de esas mismas cadenas. - Aplicación: ¡Lo ves todos los días en los correctores ortográficos!
- Relación de Recurrencia:
if (X[i] == Y[j])
ED[i][j] = ED[i-1][j-1]
else
ED[i][j] = 1 + min(ED[i-1][j], ED[i][j-1], ED[i-1][j-1])4. Problema de la Suma de Subconjuntos (Subset Sum)
- Problema: Dado un conjunto de enteros, determinar si existe un subconjunto cuya suma sea igual a un valor específico
S. - Subestructura Óptima: La posibilidad de alcanzar una suma
susando los primerosielementos depende de si se podía alcanzar esa sumascon los primerosi-1elementos. - Aplicación: Muy útil en la distribución de recursos y balanceo de carga.
- Relación de Recurrencia (lógica booleana):
DP[i][s] = DP[i-1][s] || DP[i-1][s-arr[i]]Tabla Comparativa de Problemas Clásicos
Para que tengas una referencia rápida, aquí te dejo una tabla resumen con sus complejidades y aplicaciones más comunes:
| Problema | Complejidad Temporal | Complejidad Espacial | Aplicaciones Típicas |
|---|---|---|---|
| Mochila (0/1) | O(n*W) | O(n*W) u O(W) | Optimización de recursos, finanzas |
| LCS | O(m*n) | O(m*n) u O(min(m,n)) | Bioinformática (ADN), diff de archivos |
| Distancia de Edición | O(m*n) | O(m*n) u O(min(m,n)) | Corrección ortográfica, NLP |
| Suma de Subconjuntos | O(n*S) | O(n*S) u O(S) | Criptografía, balanceo de carga |
La clave en todos estos ejemplos es siempre la misma: identificar el estado correcto y cómo se transita de un subproblema al siguiente. Si logras definir eso, tienes el 90% del problema resuelto. La práctica te enseñará a reconocer estos patrones cada vez más rápido.
Aplicación práctica en el mundo real
La programación dinámica no es solo un concepto teórico académico. Yo la veo aplicada activamente en sistemas de software reales:
- Bioinformática: Algoritmos como Needleman-Wunsch se basan en PD para alinear secuencias de ADN y proteínas, crucial para identificar relaciones evolutivas.
- Visión por computadora: El algoritmo Dynamic Time Warping (DTW) usa PD para comparar secuencias temporales en reconocimiento de voz y gestos.
- Bases de datos: Los optimizadores de consultas SQL descomponen una consulta compleja en subproblemas para elegir el orden óptimo de unión de tablas (Join ordering).
- Compiladores: Se utiliza para la asignación de registros (register allocation) y optimización de instrucciones.
- Videojuegos: Algoritmos de búsqueda de rutas y toma de decisiones en IA (como variaciones de Minimax).
Errores frecuentes y cómo evitarlos
Incluso los desarrolladores experimentados pueden tropezar al implementar PD. Aquí te listo los errores más comunes que he observado:
- Definir incorrectamente los subproblemas: Si la relación de recurrencia es incorrecta, no llegarás a la solución óptima.
- Omitir los casos base: Esto conduce a errores de cálculo y a recursiones infinitas (Stack Overflow).
- Uso excesivo de memoria: Crear una matriz gigante cuando solo necesitas las dos filas anteriores. Siempre considera si puedes optimizar el espacio a O(n) o incluso O(1).
- Finalizar prematuramente: No considerar la lógica de salida correcta en la recursión.
- No reconstruir la solución: Calcular solo el “valor máximo” pero olvidar guardar qué elementos llevaron a ese valor, perdiendo la trazabilidad de la solución.
La programación dinámica es más que una técnica algorítmica; es una forma de pensar. Requiere atención al detalle y práctica, pero dominarla te permite construir soluciones elegantes y eficientes para problemas que, de otro modo, parecerían insuperables. Si quieres poner a prueba tus habilidades, te recomiendo resolver problemas en plataformas como LeetCode.